Łatwo przekonać się do aktywnego tempomatu (ACC) w samochodzie. Kto choć raz użył, łatwo doceni wygodę nie tylko podczas długich podróży autostradą, ale także podczas zwykłej miejskiej jazdy. System nazwany ACC potrafi bowiem na tyle wyręczyć kierowcę, że trudno potem wrócić do zwykłego pojazdu bez odpowiedniej funkcjonalności. Pojazd sam zwolni, a w razie potrzeby całkowicie wyhamuje. Bez problemu utrzyma odstęp od poprzedzającego samochodu a od niedawna także zmieni pas ruchu, by dalej kontynuować podróż z zadaną prędkością. Nie jest szczególną tajemnicą, że od modelu wyposażonego w zaawansowany adaptacyjny aktywny tempomat do autonomicznego pojazdu jest bliżej niż mogłoby się wydawać.
Materiały prasowe
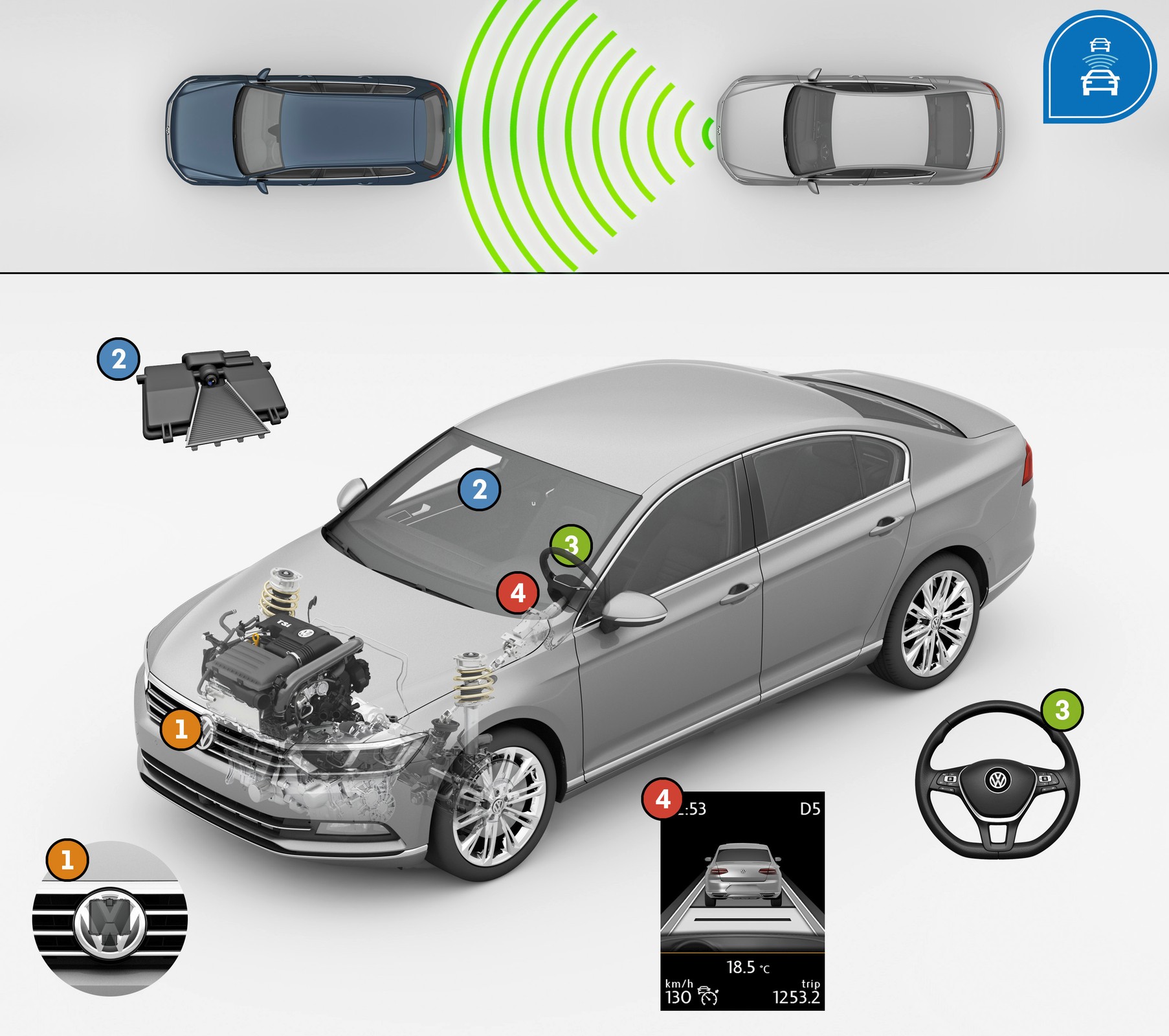
Rozmieszczenie elementów układu ACC
Od FSO Polonez do adaptacyjnego tempomatu
Początki fascynującej technologii sięgają połowy lat 80. To wówczas w Europie zainicjowano projekt badawczy Eureka Prometheus (pracowało nad nim m.in. wiele firm i producentów samochodów). Nazwa Prometheus jest wyjątkowo trafiona, choć to zaledwie skrót od PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety, czyli innymi słowy programu do poprawy bezpieczeństwa ruchu na drogach i lepszej efektywności przepływu pojazdów. W jego ramach prowadzono badania nad różnymi rozwiązaniami: autonomicznej jazdy, utrzymania pasa ruchu, monitorowania kierowcy, zarządzania flotą, systemów informacji o korkach i innymi. Program zainicjowano w październiku 1986 roku. W tym czasie w Polsce FSO dokonało poważnej modernizacji Poloneza poprzez wprowadzenie silnika o pojemności 1,6, a w publicznej telewizji premierę miał Teleexpress oraz kultowy już serial Alternatywy 4.

Materiały prasowe
Pierwszy pojazd testowy Mercedesa do badań w ramach projektów bezpieczeństwa w ruchu drogowym
Na pierwsze testy systemu aktywnego tempomatu trzeba było poczekać aż do 1994 roku, kiedy testowy egzemplarz Mercedesa klasy S przejechał ponad 1000 km po trzypasmowej autostradzie. Model nazwany VITA został wyposażony w radar (o wdzięcznej nazwie Traffonic) do obserwacji otoczenia. Inżynierowie prowadzili również próby z wykorzystaniem kamer pracujących w podczerwieni oraz zwykłych wersji video, by komputer otrzymywał jak najwięcej informacji o otoczeniu. Europejczycy nie byli jedynymi, którzy pracowali nad nową technologią. W Japonii eksperymentowano z systemami w których wykorzystano laser (LIDAR).
Japonia wybiera laser, a Europa radar.
Pierwsze systemy w wersji produkcyjnej pojawiły się na rynku w latach 90. Japońskie firmy (Mitsubishi, Toyota, Nissan) wykorzystały technologię głowic laserowych LIDAR (stosowaną do dziś w samochodach do zbieranych danych na potrzeby map do nawigacji). Europejskie wybrały zaś radar (BMW ACC, Jaguar ACC, Mercedes Distronic). Z biegiem lat radar stał się dominującym rozwiązaniem jakkolwiek zaczyna mu wyrastać nowy konkurent w postaci kamer video wysokiej jakości (mocno rozwijany w Izraelu przez Mobileye).

Materiały prasowe
Prototypowy system w Mercedesie klasy S podczas badań w ramach projektu Prometheus
Bez względu na rodzaj zastosowanej technologii (radar, lidar, kamera) system ACC współpracuje z układami ABS, ASR i ESP. To dzięki nim może kontrolować prędkość samochodu oraz hamowanie i przyspieszanie. Dla kierowcy w dużym uproszczeniu oznacza to tyle, że nie musi naciskać pedału hamulca czy gazu, by sprawnie poruszać się w ruchu miejskim czy na autostradzie. Na tym nie koniec.
Kluczowe dla bezpiecznego podróżowania z systemem ACC jest stała obserwacja otoczenia samochodu. Komputer sterujący za pośrednictwem czujników bliskiego i wydłużonego zasięgu, kamery w przedniej szybie oraz systemu parkowania i głowicy radarowej stale skanuje wszystko co się dzieje dookoła. Urządzenie rozpoznaje różne obiekty (np. poprzedzający samochód) i dostosowuje prędkość jeżeli zajdzie taka potrzeba (gdy np. funkcja automatycznej zmiany pasa ruchu nie jest potrzebna). Podczas jazdy odbywa się mnóstwo obliczeń z uwzględnieniem danych o prędkości, odległości i ewentualnych zmianach w zakresie przyspieszenia i hamowania. Według Intela tylko co sekundę do przetworzenia może być nawet 70 MB danych z lidaru, po 100 KB z sonaru i radaru, 40 MB z kamer i 50 KB z GPS.
Jak się jeździ z ACC?
Jak wygląda korzystanie z układu ACC w praktyce? Zależnie od samochodu układ aktywuje się jednym przyciskiem po osiągnięciu wymaganej prędkości. Istotny jest przy tym zakres prędkości w jakim działa system. Jeśli jest to np. nie mniej niż 30 km/h rozwiązanie nie przyda się podczas żółwiego tempa w korku. W przypadku gdy nie na dolnego limitu, to wówczas nawet podczas bardzo wolnej jazdy w korku automatyka dobierze odpowiednią prędkość, dystans i w razie potrzeby zatrzyma pojazd. Nie oznacza to jednak, że kierowca ma całkowicie wolne. By ponownie ruszyć trzeba np. dotknąć pedału gazu. W ramach zabezpieczenia rozpoznawane jest również to, czy kierowca trzyma dłonie na kierownicy (co niestety można łatwo oszukać).

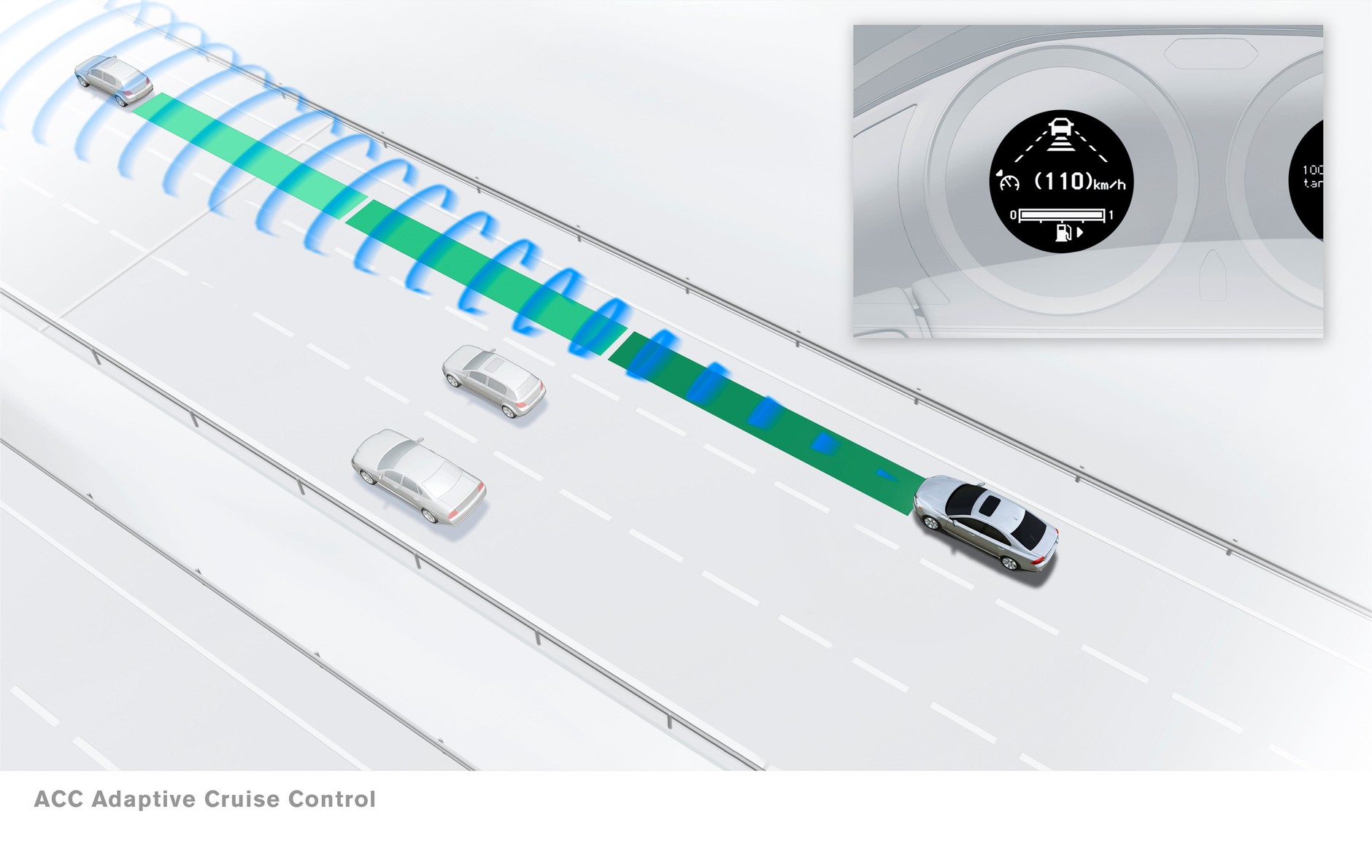
Materiały prasowe
Regulacja odległości w ramach układu adaptacyjnego tempomatu
Gdy podczas jazdy autostradowej samochód będzie utrzymywał odległość od poprzedzającego pojazdu, a ten zmieni pas ruchu, to wówczas nic złego się nie stanie. Samochód może wówczas samoczynnie przyspieszyć (do określonego limitu) i będzie utrzymywać zadaną prędkość aż do wykrycia kolejnego pojazdu na tym samym pasie. Kierowca ma oczywiście wpływ na to jak pracuje układ ACC. Może bowiem ustawić określony dystans do poprzedzającego pojazdu i tak w jak w zwykłym tempomacie wybrać maksymalną prędkość podróży. Im większą odległość ustali tym hamowanie będzie bardziej płynne i delikatne. Niemniej w sytuacji, gdy ktoś nieoczekiwanie wjedzie na nasz pas w ostatniej chwili trzeba się przygotować na nieprzyjemne hamowanie, które co bardziej wrażliwy pasażer skwituje złośliwą uwagą o braku umiejętności za kierownicą.
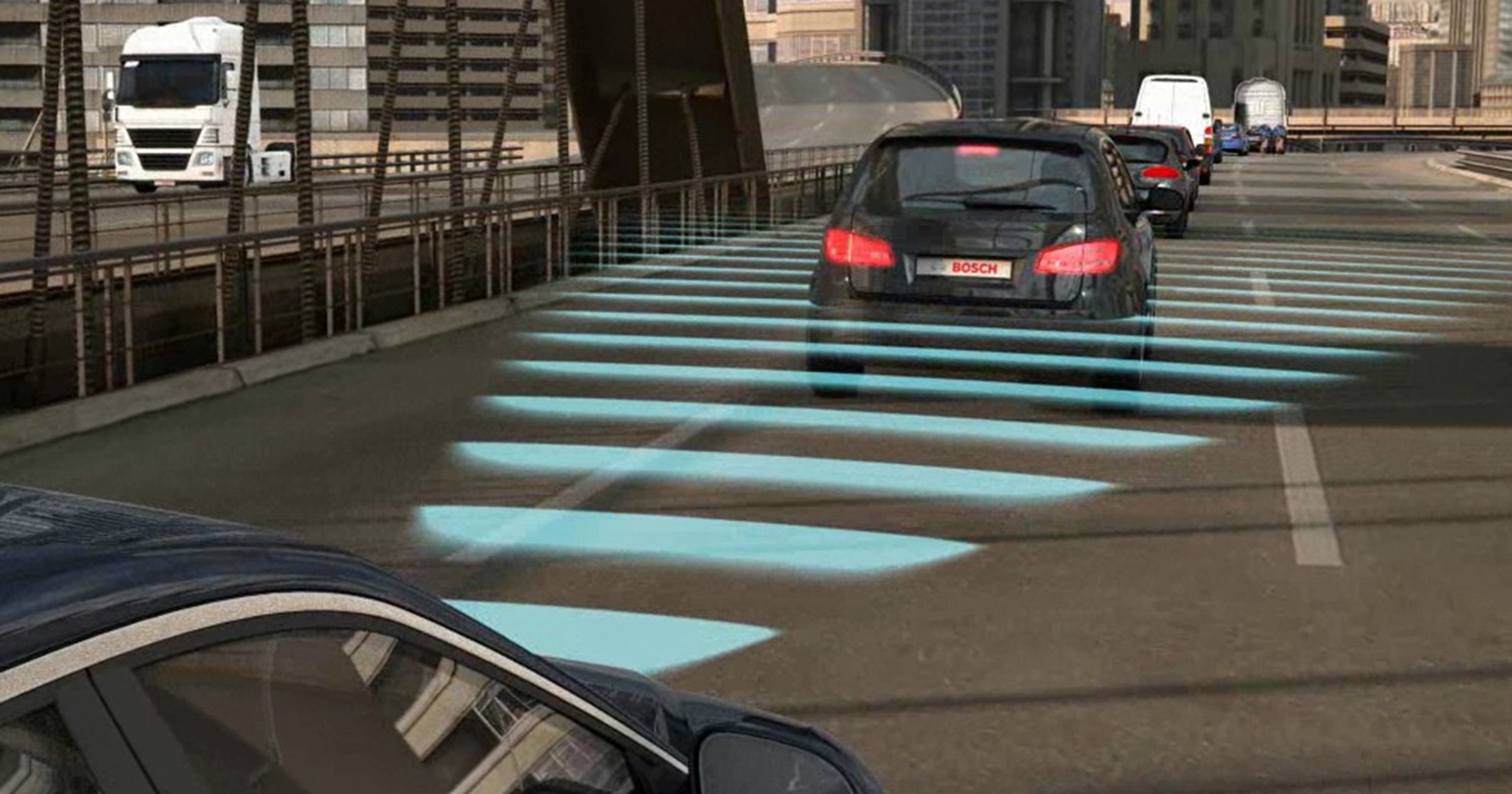
Materiały prasowe
System obserwacji otoczenia przed pojazdem
Na automatyczne hamowanie trzeba się także przygotować w sytuacji, gdy układ ACC wykorzystuje dane z kamery rozpoznającej znaki drogowe. Wówczas mimo zadanej wyższej prędkości samochód zwolni, by dostosować się do przepisów obowiązujących na danym odcinku drogi. W przypadku braku informacji z kamer pod uwagę mogą być brane dane z nawigacji.
Adaptacyjny tempomat przyszłości
W systemach ACC można jeszcze sporo udoskonalić. Nie są bowiem bez wad. Wciąż problemem są słabe warunki atmosferyczne, które mogą spowodować problemy z rozpoznaniem linii czy nawet obserwacją innych pojazdów. Wystarczą opady śniegu lub deszczu, mżawka czy mgła by zakłócić działanie. Co ciekawe nawet oślepienie silnym światłem słonecznym może spowodować problem. W przypadku kamer na kłopoty trzeba się także przygotować gdy szyba jest pokryta szronem albo jest zaparowana. Aktywny tempomat może także nie zareagować, gdy np. nagle z podporządkowanej drogi wyjedzie inny pojazd. To zresztą skłoniło inżynierów do badań nad tzw. systemami predykcyjnymi.
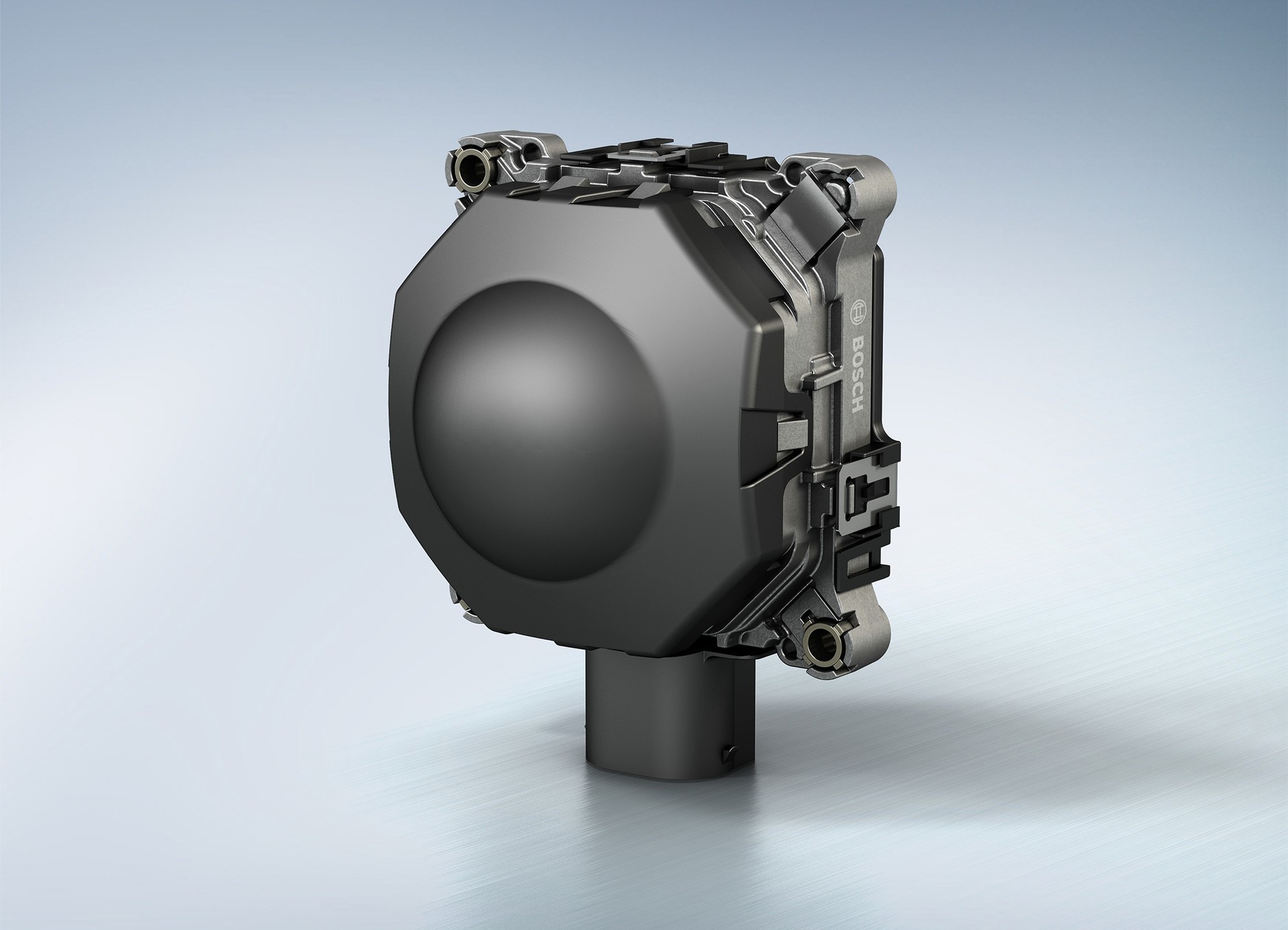
Materiały prasowe
Głowica radaru do układu ACC. Zwykle montowana jest w zderzaku lub atrapie
Wielu producentów pracuje obecnie nad systemami, które będą przewidywać możliwość wystąpienia zagrożenia. To oznacza, że zbliżając się do skrzyżowania o ograniczonej widoczności samochód automatycznie zwolni, by zwiększyć szanse uniknięcia kolizji. To samo dotyczy analizy ruchu pieszych i innych użytkowników dróg znajdujących się blisko jezdni lub podążających w przeciwnym kierunku. To już jednak temat na zupełnie inną historię.
Dalszy ciąg artykułu pod materiałem wideo
