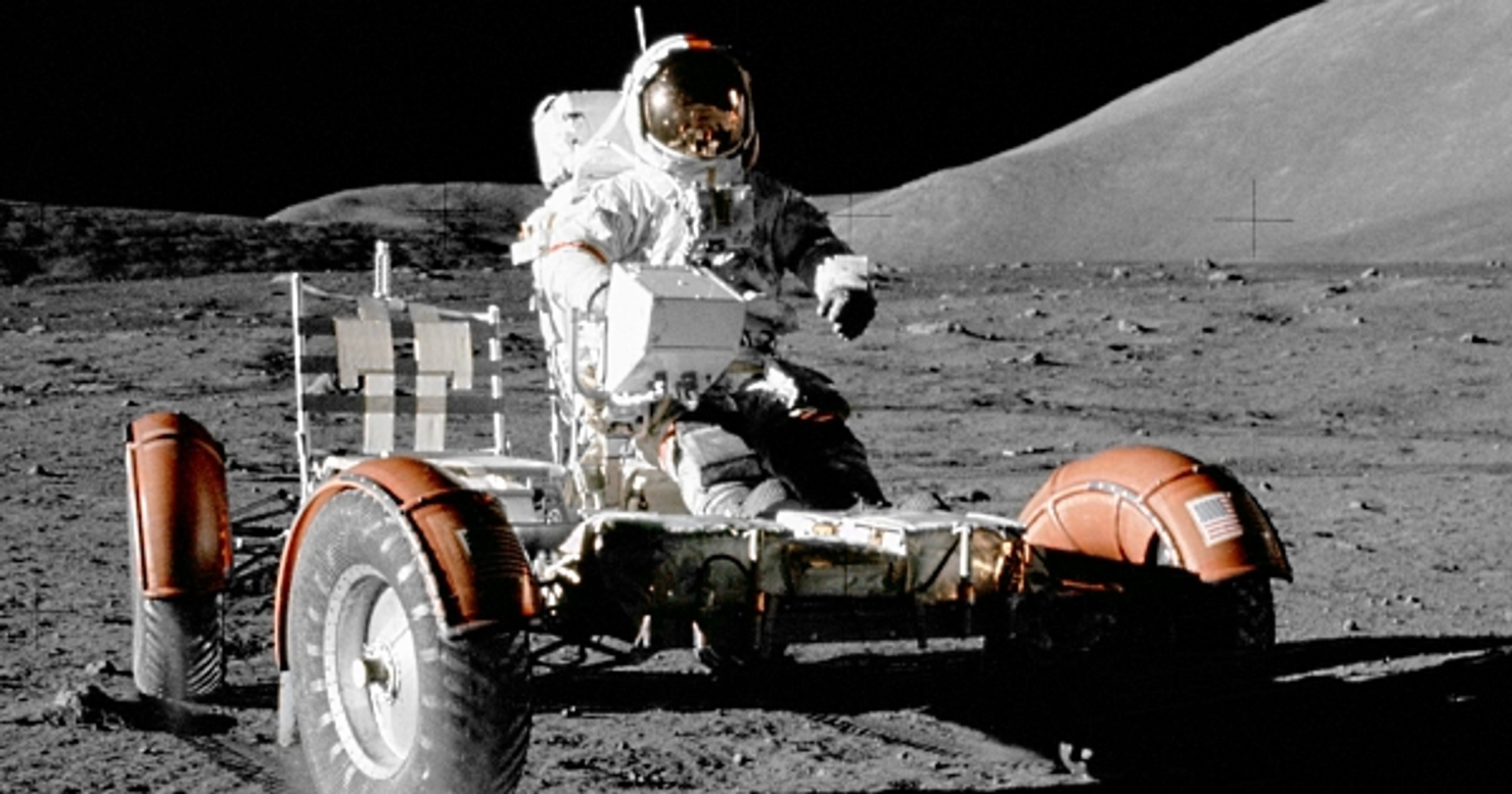
Po sukcesie pierwszych trzech misji księżycowych (Apollo 11, 12 i 14), Apollo 15 była pierwszą z sześciu misji nowego typu. Dwóch astronautów miało pozostawać na Księżycu przez trzy dni, podczas gdy Neil Armstrong i Edwin Aldrin z Apollo 11 byli na powierzchni tylko 21,5 godziny, z czego zaledwie 2,5 godziny spędzili poza lądownikiem. Kluczem do sukcesu dłuższych misji miało być wykorzystanie nowego pojazdu - LRV - do eksploracji większego obszaru wokół lądownika.
Wcześniej astronauci musieli poruszać się pieszo, co w warunkach grawitacji stanowiącej zaledwie 1/6 ziemskiego ciążenia było utrudnione: zamiast kroczyć, musieli wykonywać "bunny hops", czyli "podskoki królika". Pojazd miał sprawić, że poruszanie się po powierzchni Księżyca stanie się szybsze i efektywniejsze. Już pierwszego dnia po lądowaniu Apollo 15 okazało się, że zdecydowanie łatwiej jest przejechać nawet 200 metrów niż pokonać ten dystans na piechotę.
Gdy misja Apollo 11 jako pierwsza dotarła na Księżyc w lipcu 1969 roku (czterdziestolecie tego wydarzenia obchodzimy w tym roku) , prace nad LRV - czyli Lunar Rover Vehicle (Samobieżnym Pojazdem Księżycowym) - dopiero się zaczynały. Zlecenia tego nie otrzymał żaden z potentatów amerykańskiej motoryzacji, lecz lotniczy gigant Boeing. Za 38 milionów dolarów (wg cen z 1971 roku) powstały cztery księżycowe łaziki, z których "bojowo", w czasie kolejnych misji, wykorzystano trzy. Czwartym był nieco zmieniony egzemplarz do treningu naziemnego.
Aluminium i elektryczność
Jak przystało na rasowy samochód terenowy, LRV zbudowany był na aluminiowej ramie z niezależnym zawieszeniem czterech kół. Przy każdym z nich znajdowała się para poprzecznych trójkątnych wahaczy, połączonych z elementami resorującymi, którymi były dwa drążki skrętne. Pomiędzy wahaczami znajdował się olejowy amortyzator. Pojazd miał rozstaw osi 2286 mm, długość 3100 mm i szerokość 1828 mm. Masa wynosiła 209 kg, a ładowność 440 kg, czyli na Księżycu 73 kG.
Zespół napędowy LRV składał się z czterech silników elektrycznych o mocy 200 W każdy, zasilanych prądem stałym o napięciu 36V. Silniki umieszczono w piastach kół, a napęd przenoszony był przez przekładnie falowe. Prąd pobierany był z dwóch baterii srebrowo-cynkowych o łącznej pojemności 230 Ah, umieszczonych na panelu nadwozia pomiędzy przednimi kołami. W założeniu miały one zapewnić możliwość pokonania nawet 100 km, w praktyce nie wykorzystano ich nawet w połowie, ze względów bezpieczeństwa.
Przednią i tylną przekładnię kierowniczą napędzały silniki elektryczne (drive-by-wire). Podobnie było z bębnowymi hamulcami dla każdego z kół. W przypadku awarii hamulca lub silnika jednego z kół, astronauci mogli w prosty sposób odłączyć jego napęd (i jednocześnie hamulec), dzięki czemu koło obracałoby się swobodnie, a LRV napędzany byłby na pozostałe trzy koła. Łazik był w stanie kontynuować podróż nawet z dwoma sprawnymi silnikami, jednak wtedy nie działałby już jego system nawigacyjny i powrót do lądownika możliwy byłby tylko po własnych śladach. W czasie żadnej z trzech misji z wykorzystaniem LRV napęd łazika nie odmówił posłuszeństwa.
Zaprojektowano szczególny system kierowania - zamiast kierownicy i pedałów była dźwignia w kształcie litery "T" umieszczona między fotelami. Przesunięcie jej do przodu umożliwiało jazdę do przodu, przesunięcie do tyłu - hamowanie. Po wciśnięciu przełącznika na dźwigni i przesunięciu jej do tyłu, można było jechać na biegu wstecznym. Z kolei przechylanie tego joysticka na boki umożliwiało skręcanie. LRV można było prowadzić zarówno z lewego, jak i prawego fotela. Załoga podróżowała siedząc na fotelach wykonanych z nylonowej siatki rozpiętej na aluminiowym stelażu.
Ponieważ na Księżycu nie ma atmosfery i na jego powierzchni panuje identyczna próżnia oraz olbrzymia zmienność temperatur, niemożliwe było użycie klasycznych gumowych opon wypełnionych gazem. Dlatego koła wykonano z plecionki aluminiowego drutu (wbrew powszechnej opinii, nie były to struny fortepianowe) i wyposażono je w tytanowe elementy bieżnika (szewrony). Obręcz miała średnicę 25,5 cala.
LRV był wyposażony w kolorową kamerę telewizyjną, którą mogli sterować zarówno astronauci, jak naziemni kontrolerzy misji (ta funkcja zazwyczaj szwankowała), oraz paraboliczną antenę radiową do łączności z Ziemią. Co ciekawe, dla oszczędności prądu, LRV nie został wyposażony w żadne układy telemetryczne i astronauci byli zdani całkowicie na własną obserwację przyrządów (inaczej niż w przypadku lądownika czy modułu dowodzenia pozostającego na orbicie Księżyca).
Zestaw przyrządów był dobrze rozbudowany - oprócz prędkościomierza i przechyłomierzy (podobnych do tych znanych z samochodów terenowych) oraz wskaźników monitorujących pracę zespołu napędowego astronauci mieli do dyspozycji mechaniczny układ nawigacyjny. Dzięki żyroskopom rejestrował on przejechaną trasę i umożliwiał trafienie z powrotem do lądownika. W praktyce jednak okazało się, że LRV zostawia na powierzchni Księżyca z daleka widoczne ślady, których wystarczyło trzymać się w drodze powrotnej.
Udany prototyp
Projekt zrealizowano w ekspresowym tempie, choć z punktu widzenia konstruktorów największą trudnością była nieznajomość terenu, po którym pojazd miał się poruszać. Próbki gruntu (regolitu) z wcześniejszych lądowań bardzo się od siebie różniły, a rozdzielczość zdjęć miejsca lądowania pierwszej misji z LRV wynosiła zaledwie 20 metrów. Z tego powodu nie sposób było ocenić wielkość przeszkód (głazów, kraterów), które miał na swojej drodze napotkać łazik. Jedyną precyzyjną informacją, jaką dysponowali projektanci, były dane na temat grawitacji. Na temat samej powierzchni wiadomości były w najlepszym razie sprzeczne W rezultacie budowa kół LRV była efektem pełnej zgadywanki. A jednak kombinacja plecionego aluminiowego drutu z tytanowymi "jodełkami" bieżnika okazała się strzałem w dziesiątkę!
Na Księżyc LRV transportowany był, częściowo złożony, w schowku lądownika LM (Lunar Module). Dwójka astronautów przy użyciu lin musiała go wyciągnąć na powierzchnię, a w trakcie tej czynności pojazd automatycznie się rozkładał. Taki sposób wyładunku był możliwy, ze względu na sześciokrotnie mniejsze ciążenie na Księżycu niż na Ziemi.
W czasie misji Apollo 16 ustanowiono rekord prędkości wynoszący 18 km/h, jednak w zwykłej eksploatacji LRV poruszał się z prędkością podróżną 10 km/h, którą umiał utrzymać nawet na stromych podjazdach. Żeby ominąć większą przeszkodę, astronauci najpierw musieli zwolnić, a dopiero potem skręcić, gdyż przy "większych prędkościach" (wspomniane 10 km/h) pojazd wpadał w podsterowny poślizg. Zawieszenie pojazdu zaskakująco dobrze radziło sobie z większością wybojów, z rzadka tylko "dobijając". Załogę w fotelach utrzymywały proste dwupunktowe biodrowe pasy bezpieczeństwa. Przyspieszenie było imponujące - LRV osiągał prędkość podróżną na dystansie trzech swoich długości, przy minimalnym poślizgu kół.
LRV okazał się nad wyraz mało awaryjny. Wprawdzie pierwszego dnia misji Apollo 15 z niewyjaśnionych do dziś powodów nie działało sterowanie przednimi kołami, to usterka naprawiła się "sama" następnego dnia. Piętą achillesową okazały się dość kruche błotniki kół, które odpadały od konstrukcji przy najlżejszym kontakcie z przeszkodą. Jazda bez nich była problematyczna, bo zarówno konstrukcja, jak i astronauci szybko pokrywali się warstwą pyłu. W tej sytuacji załoga musiała naprawiać LRV przy użyciu tego, co było pod ręką: zapasowych map, pasków rzepów, taśmy samoprzylepnej oraz... zatrzaskowych uchwytów do przenośnych lampek.
Mimo to pojazd zdobył tak duże zaufanie swoich kierowców, że podczas trzeciej misji z jego użyciem (Apollo 17) kierownictwo NASA zdecydowało się zrezygnować z zasady nieoddalania się łazikiem dalej niż 5 km od lądownika. Wcześniej chodziło o to, by w razie unieruchomienia LRV astronauci mieli szansę na powrót do lądownika na piechotę. Dzięki tej decyzji zasięg penetracji terenu jeszcze bardziej się poszerzył. Warto podkreślić, że w opinii ekspertów już misja Apollo 15 przyniosła lepsze efekty naukowe niż wcześniejsze trzy razem wzięte. Niestety, mimo tak obiecujących efektów użycia LRV, NASA zrezygnowała z misji Apollo 18, 19 i 20 z powodu braku funduszy.
Żaden z Lunar Roving Vehicles nie wrócił na Ziemię - wszystkie pozostały na Księżycu zaparkowane niedaleko dolnej części modułu LM (stanowiącej platformę startową malutkiego modułu załogowego wznoszącego się na orbitę Księżyca). W dwóch ostatnich misjach wykorzystano zdalnie kierowaną kamerę LRV do sfilmowania momentu startu LM z powierzchni Księżyca. Fakt, że nawet dzisiejszy poziom techniki nie pozwala na dostrzeżenie na powierzchni Księżyca tak małych obiektów podtrzymuje teorie spiskowe, według których program Apollo przerwano po katastrofie statku Apollo 1 (spłonął na wyrzutni wraz z załogą), a zdjęcia i filmy z Księżyca sfingowano. Oficjalne informacje są jednak inne - pojazdy LRM uczestniczyły w trzech misjach, (Apollo 15 - lipiec 1971, Apollo 16 - kwiecień 1972 i Apollo 17 - grudzień 1972). W czasie tych wypraw pokonały odpowiednio 26,7, 26,6 i 35,9 km, rozpoczynając erę ziemskiej motoryzacji na Księżycu.
