






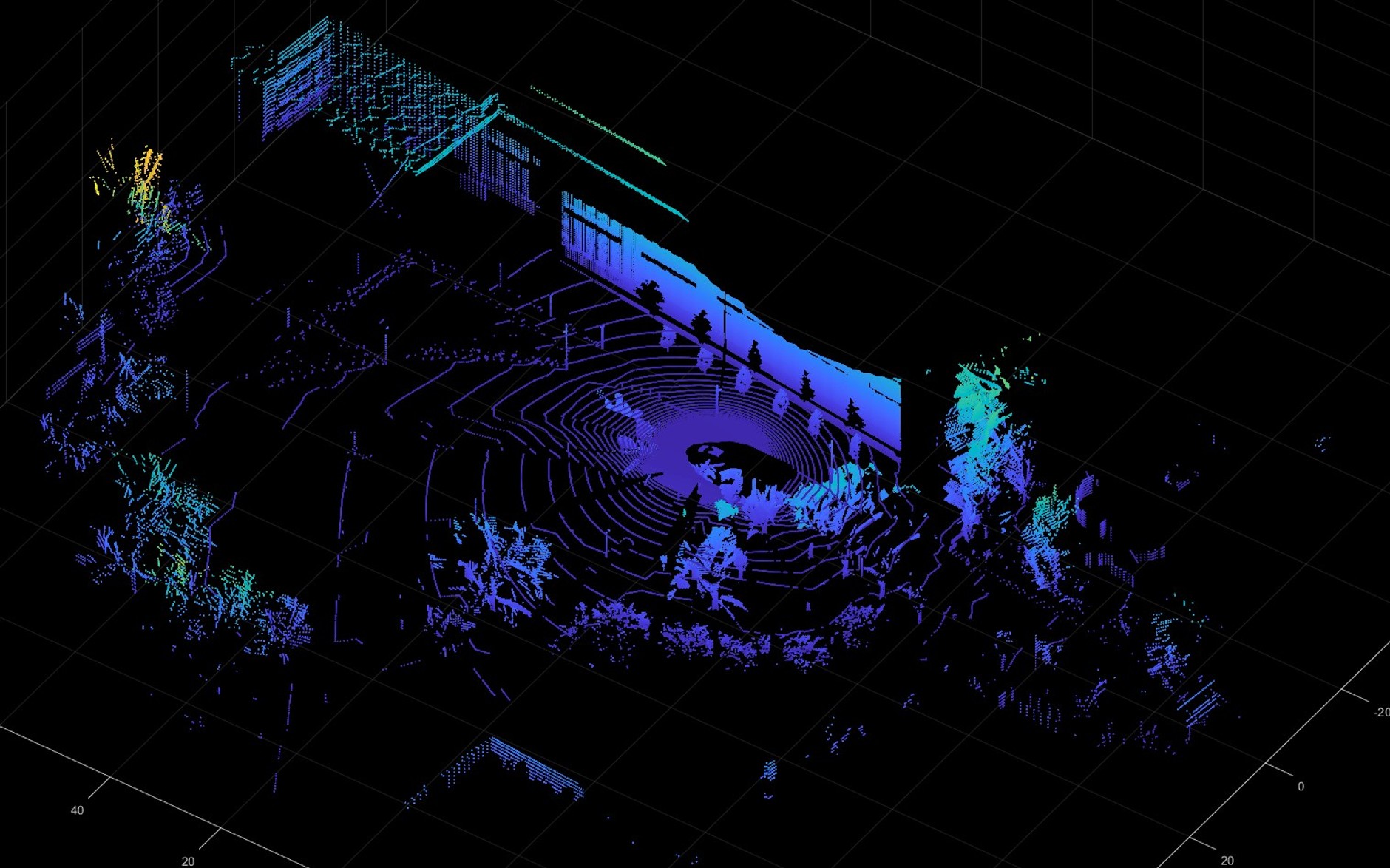
- Skanowanie laserowe lidar przydaje się do stworzenia trójwymiarowego obrazu otoczenia samochodu
- Czujniki lidar świetnie sprawdzają się podczas nocnej jazdy, by wykrywać potencjalne zagrożenia drogowe
- Niestety nawet najnowocześniejsze urządzenia mogą błędnie wykrywać obiekty podczas jazdy we mgle lub w deszczu
- Więcej takich informacji znajdziesz na stronie głównej Onet.pl
Każda technika ma swoje ograniczenia. Nawet najlepsze kamery to za mało, by korzystać z w pełni zautomatyzowanej jazdy. Podobnie jest z czujnikami radarowymi. Stąd wielu producentów coraz chętniej sięga po technologię laserowych głowic lidar (według prognoz już w 2024 r. na rynek trafi ponad 3 mln. urządzeń do samochodów), by poprawić obserwację otoczenia i wykrywanie różnych obiektów jakie możemy napotkać po drodze.
Lidar od lat ceni szczególnie jedna branża
Lidar bez trudu wykryje m.in. niemetalowe obiekty (jak np. beton czy skały). Świetnie także sprawdza się w nocy, by z dużej odległości wykrywać potencjalne zagrożenia. Nie dziwi więc, że jest tak chętnie używany w branży nawigacyjnej do gromadzenia danych do nowych map cyfrowych. Dzięki obrotowym głowicom łatwo bowiem stworzyć trójwymiarowy obraz całego otoczenia pojazdu.
Przeczytaj też:
Niestety lidar nie jest doskonały (i dość kosztowny – pierwsze modele wyceniano na dziesiątki tysięcy dolarów). Nawet najnowocześniejsze głowice laserowe stają się niemal bezużyteczne podczas opadów deszczu. Od lat dobrze o tym wiedzą kierowcy samochodów ze specjalistyczną aparaturą GPS. Gdy tylko pojawiają się pierwsze opady deszczu czy śniegu, zwykle kończą one pracę, zatrzymują rejestrowanie przebiegu poszczególnych tras i skanowanie całego otoczenia. Opady czy mgła dość skutecznie zakłócają pracę urządzenia emitującego impulsy laserowe (wiązki światła odbijającego się od obiektów i powracającego do detektora).
Jedna stłuczka i finansowa katastrofa
Do podobnych wniosków doszli naukowcy z brytyjskiego Uniwersytetu Warwick w Coventry. Przetestowali czujniki lidar przy różnym natężeniu opadów deszczu. Podczas badań w symulatorze okazało się, że jednym z kluczowych problemów było odbijanie światła przez krople, które traktowane były jako obiekty znajdujące się na drodze samochodu. Drobinki wody w powietrzu (mgła) na tyle zakłócały działanie czujnika, że wykrywanie kluczowych obiektów (z punktu widzenia bezpieczeństwa jazdy) stało się niezwykle trudne. W praktyce zatem można przeoczyć nie tylko innych uczestników ruchu, ale nawet elementy infrastruktury drogowej (znaki, szlabany, bariery, budynki, itp.).
Cóż zatem pozostaje? By zwiększyć efektywność wykrywania zagrożeń, potrzeba więcej różnych czujników. A to zaś oznacza, że im nowocześniejsze auto, tym skutki nawet drobnej stłuczki mogą okazać się przykrą niespodzianką ze względu na koszty naprawy elementów ukrytych w zderzaku czy innych częściach auta. Nietrudno zgadnąć, jakie to będzie mieć przełożenie na stawki polis ubezpieczeniowych.
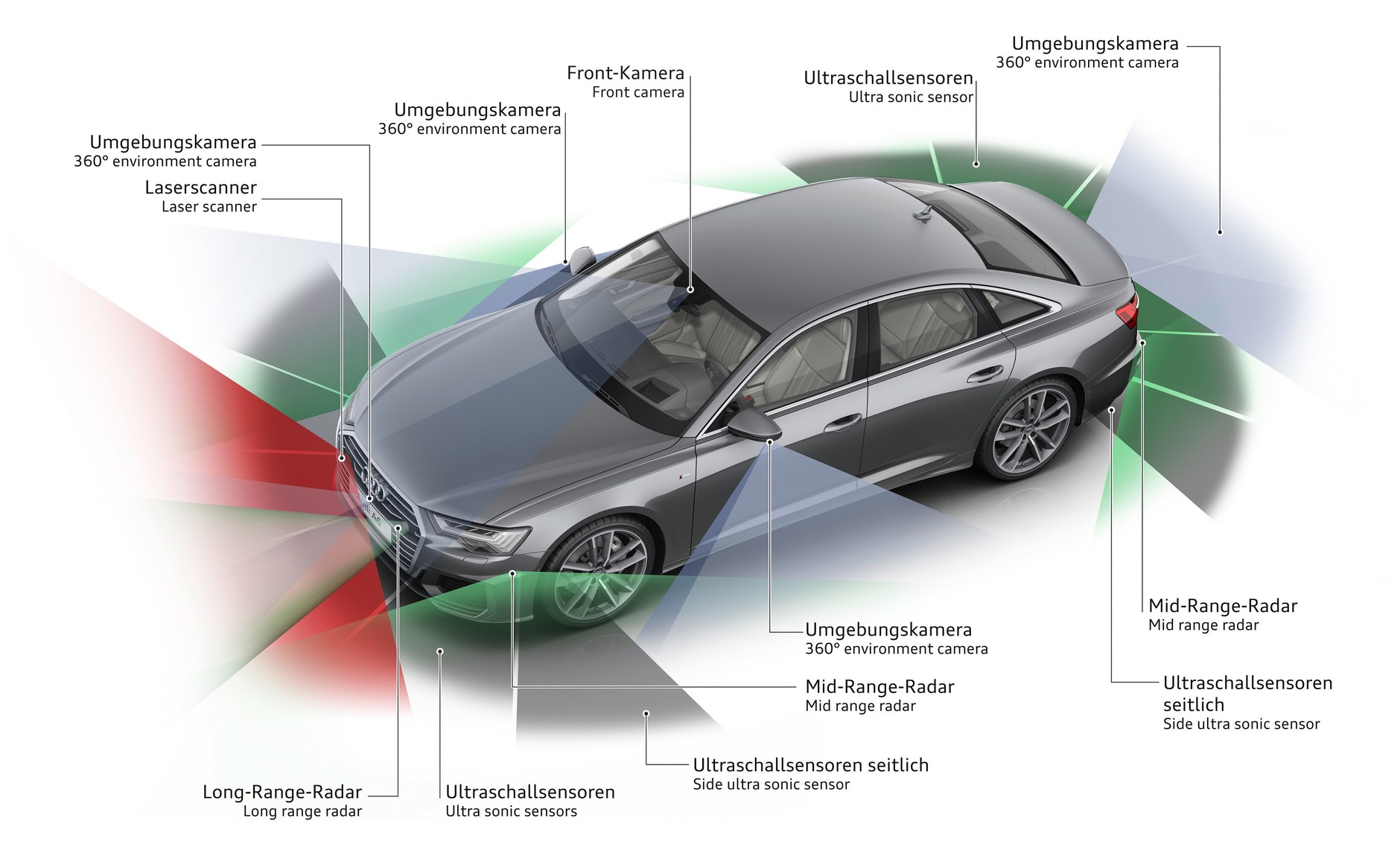
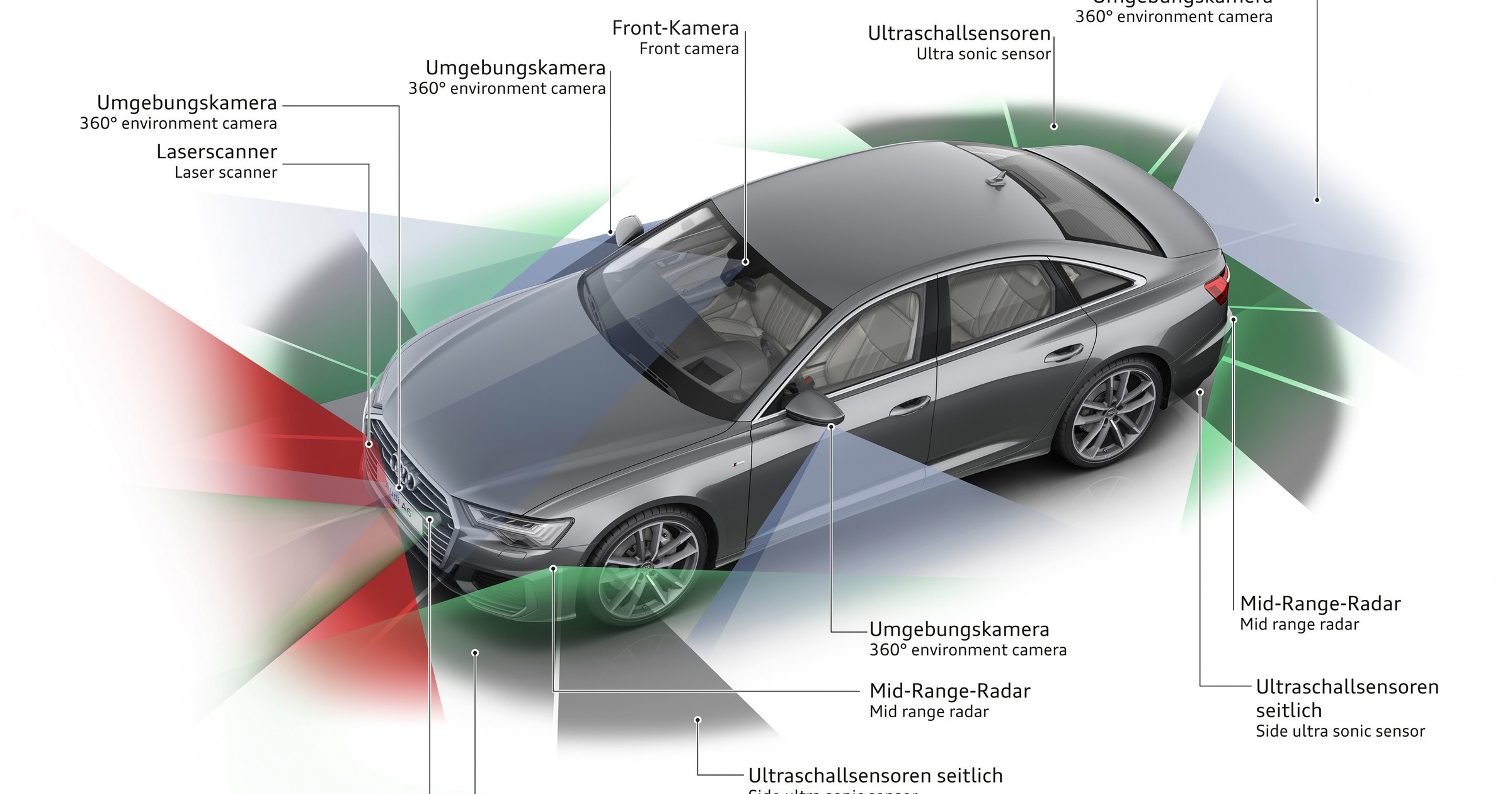
Audi / Audi
Czujnik laserowy umieszcza się z przodu pojazdu. W autach do zbierania danych do map cyfrowych stosuje się obrotowe głowice na dachu.
Czujnik laserowy umieszcza się z przodu pojazdu. W autach do zbierania danych do map cyfrowych stosuje się obrotowe głowice na dachu.

Univeristy of Warwick / University of Warwick
Test lidaru podczas symulacji na brytyjskiej uczelni
Test lidaru podczas symulacji na brytyjskiej uczelni
Univeristy of Warwick / University of Warwick
Obraz z czujnika lidar
Obraz z czujnika lidar
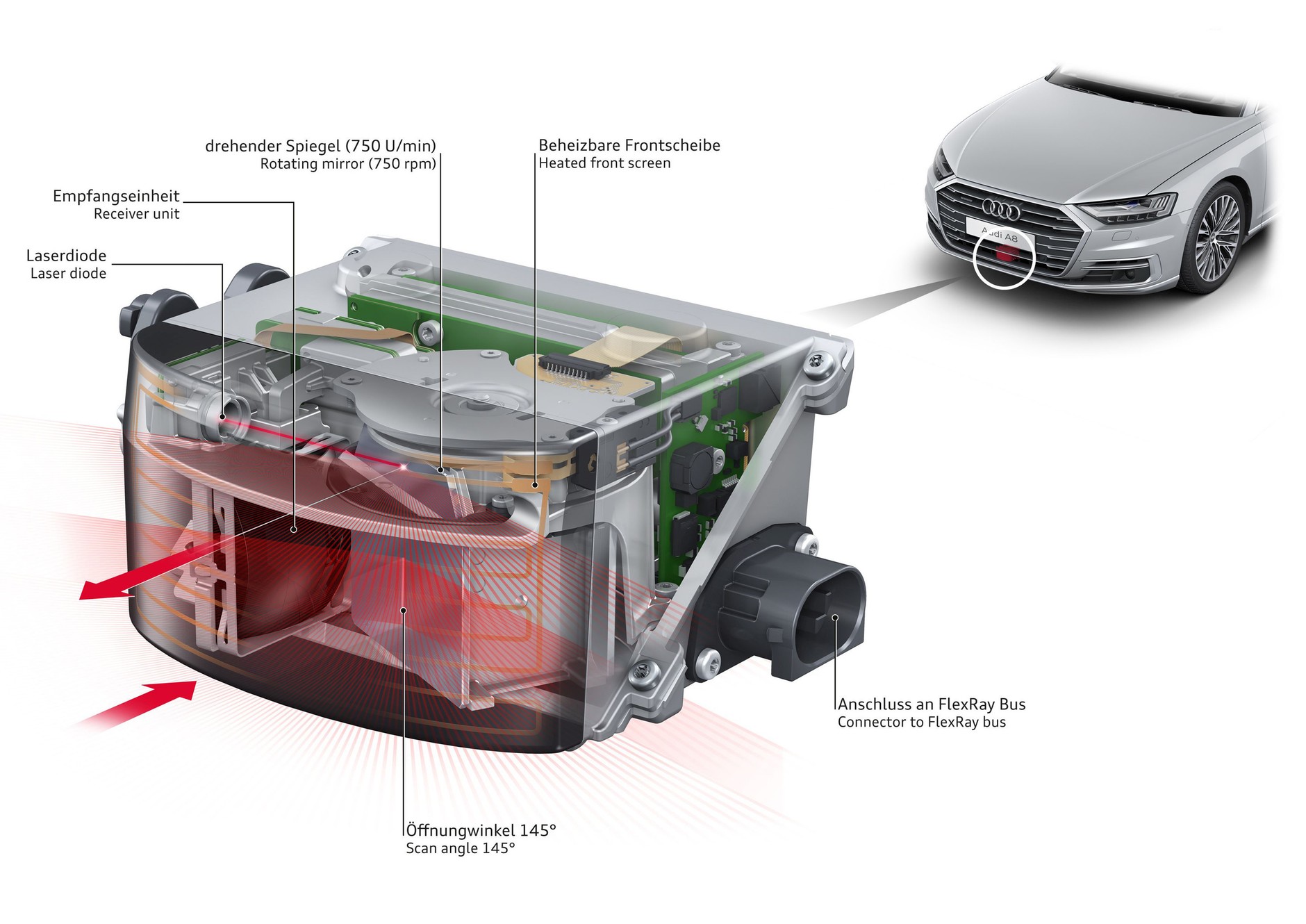
Audi / Audi
Czujnik przydaje się m.in. do pomiaru odległości
Czujnik przydaje się m.in. do pomiaru odległości
